线段树是一种树形结构,它将数据序列划分为若干个线段,每个线段包含若干个数据元素。
线段树主要用于高效处理区间查询和更新问题,其核心作用包括:
快速区间查询 通过预处理数据,可在对数时间复杂度(O(logN))内查询区间内元素的出现次数或统计信息(如最大值、最小值、总和等)。
高效区间更新 支持对区间内元素值进行修改,并通过懒标记等技术减少重复计算,优化更新操作的效率。
空间优化需求 未优化的线段树空间复杂度为2N,实际应用中通常需要4N的数组空间以避免越界,有时需配合离散化进一步压缩空间。
T2
题目给出了2个操作
- 查询中最大连续子段和
- 将改为
由与这道题涉及到了区间求和和单点修改,所有考虑用线段树
怎样在线段树中维护区间最大连续子段和呢? 类比用分治求最大连续子段和
- 求左子区间的最大子段和
- 求右子区间的最大子段和
- 求包含的最大子段和
其中最难的是3,3可以表是为左子区间的最大后缀和加上右子区间的最大前缀和
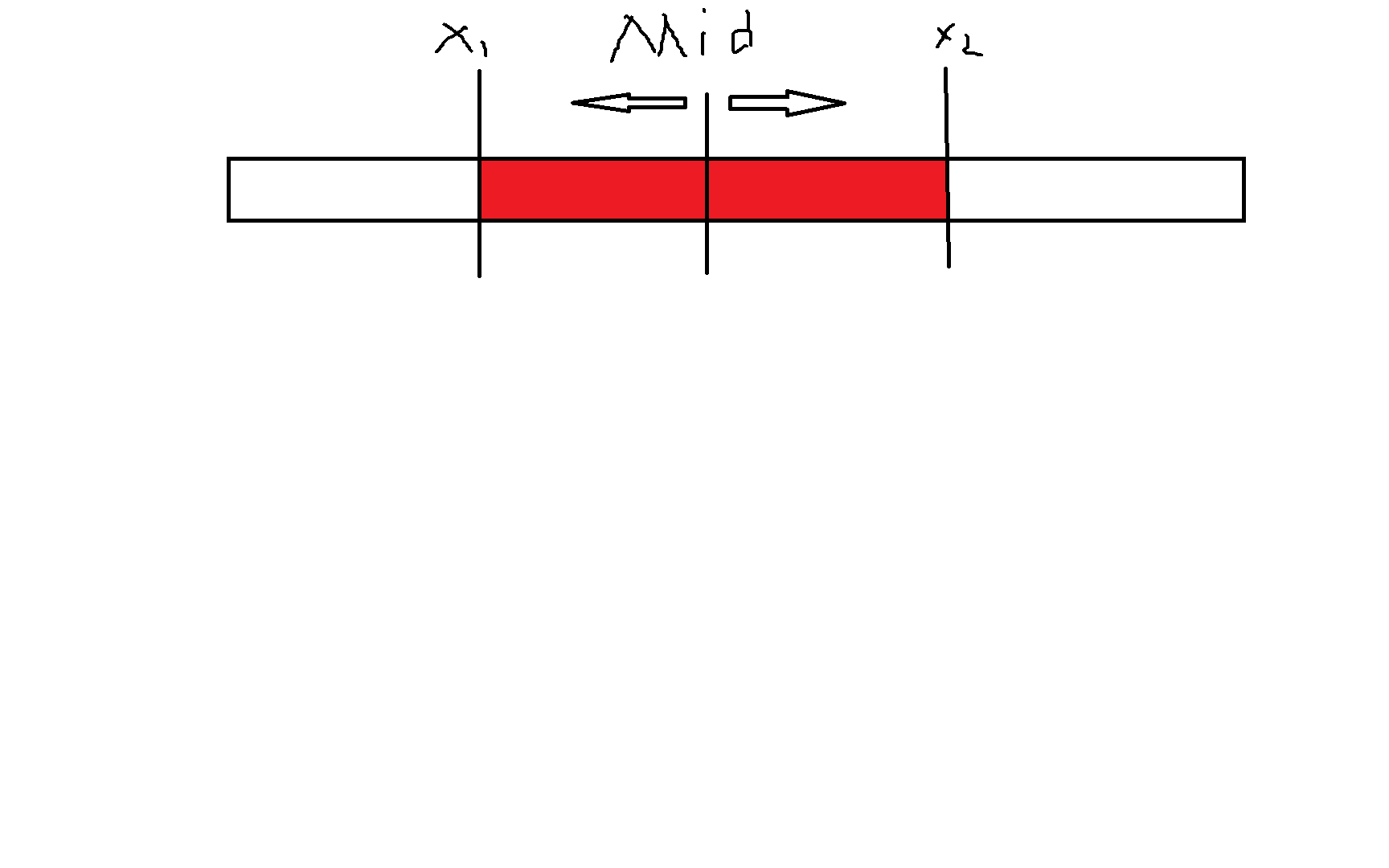
为左子区间的最大后缀和的下标 为右子区间的最大前缀和的下标
#include<iostream>
using namespace std;
const int N=5e5+10;
int n,m;
struct D{
int l,r;
int ts,ls,rs,sum;
}tr[4*N];
int a[N];
void pushup(D &x,D &l,D &r){
x.sum=l.sum+r.sum;
x.ts=max(max(l.ts,r.ts),l.rs+r.ls);
x.ls=max(l.ls,l.sum+r.ls);
x.rs=max(r.rs,r.sum+l.rs);
}
void pushup(int k){
pushup(tr[k],tr[k<<1],tr[k<<1|1]);
}
void build(int l,int r,int k){
tr[k]={l,r};
if(l==r){
tr[k]={l,r,a[l],a[l],a[l],a[l]};
return;
}
int mid=(r+l)>>1;
build(l,mid,k<<1);
build(mid+1,r,k<<1|1);
pushup(k);
}
void modify(int x,int w,int k){
int l=tr[k].l,r=tr[k].r;
if(l==r&&r==x){
tr[k]={l,r,w,w,w,w};
return;
}
int mid=(l+r)>>1;
if(x<=mid) modify(x,w,k<<1);
if(x>mid) modify(x,w,k<<1|1);
pushup(k);
}
D query(int l,int r,int k){
int x=tr[k].l,y=tr[k].r;
if(l<=x&&y<=r){
return tr[k];
}
int mid=(x+y)>>1;
if(r<=mid) return query(l,r,k<<1);
else if(l>mid) return query(l,r,k<<1|1);
else{
D lp=query(l,r,k<<1),rp=query(l,r,k<<1|1),res;
pushup(res,lp,rp);
return res;
}
}
int main(){
cin>>n>>m;
int op;
int x,y;
for(int i=1;i<=n;i++) cin>>a[i];
build(1,n,1);
for(int i=1;i<=m;i++){
cin>>op>>x>>y;
if(op==1) {
cout<<query(min(x,y),max(x,y),1).ts<<endl;
}
else{
modify(x,y,1);
}
}
return 0;
}
T5
题目大意就是给出个矩形求总面积(重复的只计算一遍)
这道题需要用到扫描线
扫描线:假设有一条扫描线从一个图形的下方扫向上方(或者左方扫到右方),那么通过分析扫描线被图形截得的线段就能获得所要的结果。该过程可以用线段树进行加速。
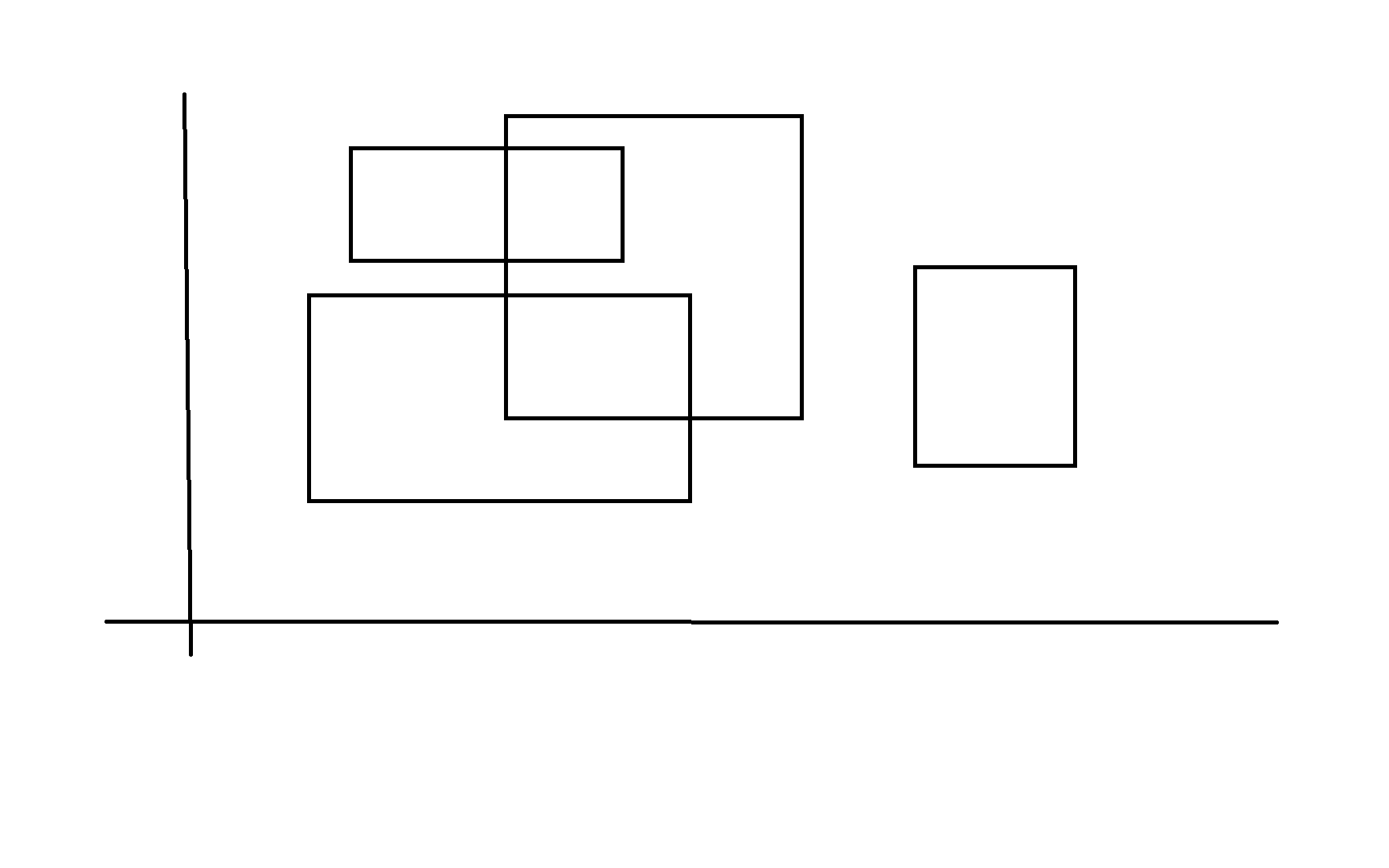 如图,图中有4个矩形,我们从左至右进行扫描,碰到竖线就标记
如下图
如图,图中有4个矩形,我们从左至右进行扫描,碰到竖线就标记
如下图
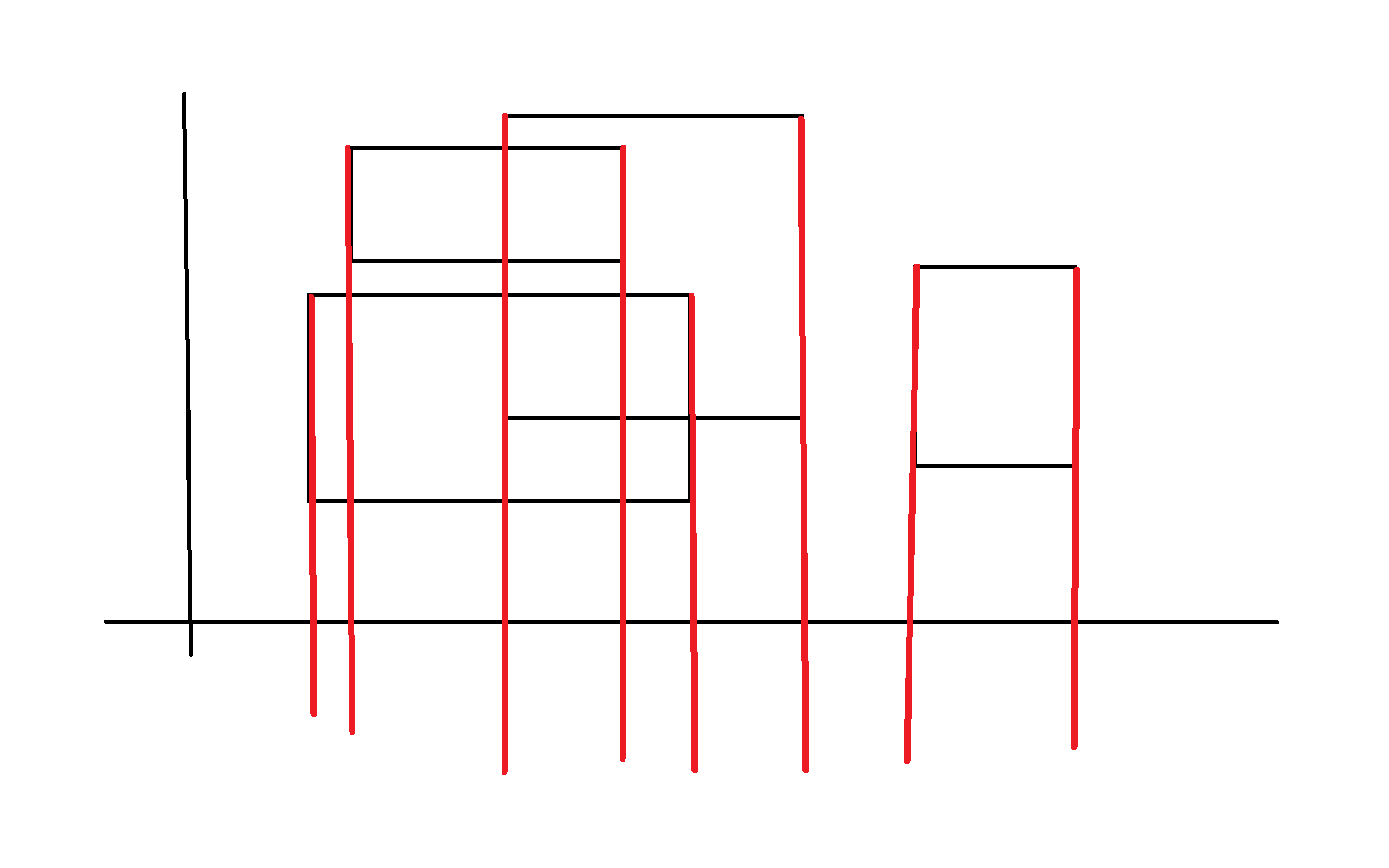 我们可以定义每个矩形左边的权值为1,右边为-1
我们可以定义每个矩形左边的权值为1,右边为-1
然后把所有的竖边按照x坐标升序排序。这样,对于每个矩形,扫描线总是会先碰到左边,然后再碰到右边。那么就能保证扫描线所截的长度永远非负了。
这样操作以后,就可以和线段树扯上关系。先把所有端点在y轴上离散化(其实就是把所有点的纵坐标存到Y[]里,然后升序排个序,最后去重)。
建立一棵线段树,其每个端点维护一条线段(也就是一个区间)的信息:
- 该线段被覆盖了多少次(被多少个矩形所覆盖)。
- 该线段内被整个图形所截的长度是多少。
显然,只要一条线段被覆盖,那么它肯定被图形所截。所以,整个问题就转化为了一个区间查询问题,即:每次将 当前扫描线扫到的边 对应的信息 按照之前赋上的权值更新,然后再查询线段树根节点的信息,最后得到当前扫描线扫过的面积。这就可以用线段树来实现了
#include<bits/stdc++.h>
using namespace std;
const int N = 1e6+20;
int n;
vector<double> ys;
struct node {
double x, yl, yr;
int k;
bool operator< (const node &t)const {
return x < t.x;
}
} sg[N * 2];
struct tree {
int l, r;
int cnt;
double len;
} t[N * 8];
int find(double x) {
return lower_bound(ys.begin(), ys.end(), x) - ys.begin();
}
void pushup(int u) {
if (t[u].cnt) {
t[u].len = ys[t[u].r + 1] - ys[t[u].l];
} else if (t[u].l != t[u].r) {
t[u].len = t[u << 1].len + t[u << 1 | 1].len;
} else {
t[u].len = 0;
}
}
void build(int u, int l, int r) {
if (l == r) {
t[u] = {l, r, 0, 0};
} else {
t[u] = {l, r};
int mid = l + r >> 1;
build(u << 1, l, mid);
build(u << 1 | 1, mid + 1, r);
}
}
void change(int u, int l, int r, int k) {
if (t[u].l >= l && t[u].r <= r) {
t[u].cnt += k;
pushup(u);
} else {
int mid = t[u].l + t[u].r >> 1;
if (l <= mid) {
change(u << 1, l, r, k);
}
if (r > mid) {
change(u << 1 | 1, l, r, k);
}
pushup(u);
}
}
int main() {
int T = 1;
while (cin >> n && n) {
ys.clear();
for (int i = 1, j = 0; i <= n; i++) {
double x, xx, y, yy;
cin >> x >> y >> xx >> yy;
sg[j++] = {x, y, yy, 1};
sg[j++] = {xx, y, yy, -1};
ys.push_back(y);
ys.push_back(yy);
}
sort(ys.begin(), ys.end());
ys.erase(unique(ys.begin(), ys.end()), ys.end());
build(1, 0, ys.size() - 2);
sort(sg, sg + n * 2);
double ans = 0;
for (int i = 0; i < n * 2; i++) {
if (i > 0) {
ans += t[1].len * (sg[i].x - sg[i - 1].x);
}
change(1, find(sg[i].yl), find(sg[i].yr) - 1, sg[i].k);
}
cout << "Test case #" << T++ << endl;
cout << "Total explored area: " << fixed << setprecision(2) << ans << endl;
cout << endl;
}
return 0;
}
